Performansa xweşbînkirina bi MPU-6050: Setup, Calibration, û Serlêdan
2024-04-25
9237
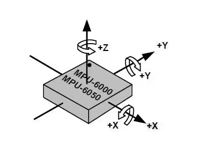
MPU-6050 Yekemîn beşa pêvajoyê ya yekbûyî ya cîhanê yeArmanca karanîna wê ev e ku meriv li ser xêzika bîhnfirehiyê were pîvandin (wek quadcopter, otomobîlek balansek) li ser x, y, û z ax, angaşta pitch, angle ya yaw.Em şeş daneyên MPU-6050 (nirxa reklama du-axê û nirxa reklamê ya angular a angaştîn a sê-axê) di navbêna I2C de.Piştî pêvajoya fusionê ya postkirinê, pîvaz, roll, û angên yaw dikarin werin hesibandin.Wekî ku ji bo nirxên pîvanê, rêzika hevrêziya senzorê, wekî prensîbê pergala koordînasyona rastgir a rast tê nîşandan (ew e, tiliya rastê ya ji bo x-Axir, tiliya nîşana nîşanê erênî ya erênî ya Y-ax, û tiliyên navîn li ser rêça erênî ya Z-ax. Directions).
Ketelog
Bi otobusê Sensor I2C ya I2C re, MPU-6050 bikaribe rasterast ji kompleksa 3-axa derveyî bistîne, peydakirina tevahî 9-axa motîfek domdar.Ew pirsgirêka cûdabûnê di navbera demjimêra gyroscope û bilez a hevbeş de vala dike û bi girîngî cîhê pakkirinê kêm dike ku li gorî çareseriyên pir-rêgezê kêm dibe.Gava ku bi magnetometerek sê-ax re girêdayî ye, MPU-60x0-ê dikare hilberîna fusion 9-ax bi tevahî I2C an PORTê xwe ya bingehîn derxe (Têbînî ku Portê SPI li ser MPU-6000 heye).
Alternatîf û wekhev
- MPU-3300
- MPU-6000
- MPU-6500
Hilberînerê MPU-6050
Hilberînerê MPU-6050 TDK ye.Piştî du damezrênerên TDK, Dr. Yogoro Kato û Takei Takei, Ferrite li Tokyo, wan Tokyo Denkikagaku Kogyo K.K.Di sala 1935-an de wekî pîşesaziyek pîşesaziyê ya elektronîkî, TDK her gav pozîsyonek serdest li zeviyên madeyên xav ên elektronîkî û hêmanên elektronîkî domand.Portfolio ya berfireh û nûvekirina hilberîner a TDK-ê wekî kapasîteyên seramîk, kapasîteyên elektrolîtîk, hilberên magnetîkî, pêkhateyên magnetîkî, amûrên berbiçav û parastinê (wekî germ û zextê)Sensorên magnetîkî û mems), hwd. Wekî din, TDK jî amûrên hêzê û amûrên enerjiyê, serê magnetîkî û hilberên din peyda dike.Berhemên hilberê wê TDK, Epcos, invensense, Micronas, Tronics û TDK-Lambda hene.
Diagramê navxweyî ya MPU-6050
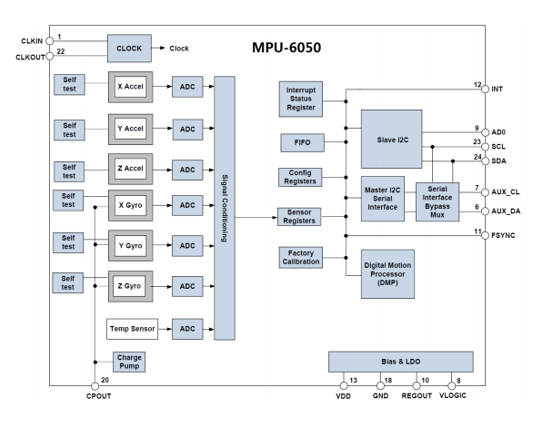
Di nav wan de, SCL û Sda navbeynên IIC-ê ne ku bi MCU ve girêdayî ne, û MCU bi vê navberê IIC-ê MPU-6050 kontrol dike.Di heman demê de navbeynek IIC jî heye, Namely AUX_CL û AUX_DA.Ev navbeynkar dikare were bikar anîn da ku amûrên xulamê derveyî, yên wekî senzorên magnetîkî ve girêdayî bikin, ji bo avakirina hestek neh axê.Vlogic voltaja Portê IO ye.Ev pin dikare bi kêmî ve 1.8V piştgirî bike.Em bi gelemperî rasterast bi vdd ve girêdayî dikin.AD0 navnîşa navnîşa navnîşan ya navbeynê IIC-ê ya xulam e (bi MCU ve girêdayî ye).Vê PIN-ê navnîşa IIC-ê ya herî kêm kontrol dike.Heke ew bi GND ve girêdayî ye, navnîşa IIC ya MPU-6050 0x68 e;Heke ew bi VDD ve girêdayî ye, ew 0x69 e.Ji kerema xwe navnîşa ku li vir navnîşa danûstendina herî kêm ya daneyê tune ye (bitenê herî hindik tête bikar anîn ku hûn li ser operasyonên xwendin û nivîsandinê nûner bikin).Li ser mwbalancedstc15, AD0 bi GND ve girêdayî ye, ji ber vê yekê navnîşa IIC ya MPU-6050 e 0x68 (ji bilêta herî kêm).
Navbera iIC-ê destpêkê bikin
MPU-6050 IIC bikar tîne da ku bi STC15 re têkilî daynin, ji ber vê yekê pêdivî ye ku em yekem rêzên daneyên SDA û SD-ê bidin destpêkirin.
Reset MPU-6050
Vê pêngavê hemî qeydên di hundurê MPU-6050-ê de ji nirxên xweyên xwerû re, ku bi nivîsandina 1-ê ve tê bidestxistin, qeydkirî ye 1 (0x6b).Piştî vekişînê, Rêvebirê Rêvebiriya Hêza 1 dê li nirxa xwerû were sererast kirin
Rêzeya tev-pîvanê ya senzorên leza angular (GYRO) û Sensora bilez bicîh bikin
Di vê pêngavê de, me her du sensor (FSR) du senzeran bi navgîniya mîhengê gyroscope (0x1b) û rêzika mîhengê sensasyonê ya berevajî (0x1c) bi rêzdarî destnîşan kir.Bi gelemperî, me rêzika tevahî ya gyroscope ji ± 2000dps û rêzika tevahî ya bilez a bilez 2G.
Parametreyên din danîn
Li vir, em jî hewce ne ku parametreyên jêrîn binihêrin: Destpêkê qut bikin, Destpêka Aux I2C-ê nekêşînin, rêjeya nimûneya Gyroscope bicîh bikin, û fîltera nizm a dîjîtal bicîh bikin (DLPF).Ji ber ku em ji bo xwendina daneyan di vê beşê de bikar tînin, pêdivî ye ku fonksiyona navbeynkariyê were girtin.Di heman demê de, ji ber ku em ne bi karanîna navgîniya Aux I2C bikar tînin da ku hestyarên din ên derveyî ve girêdin, em jî hewce ne ku vê navberê bigirin.Van fonksiyonan dikarin bi navgîniya qeydkirina inturrupt (0x38) û qeydkirina kontrolê ya bikarhêner (0x6A) werin kontrol kirin.MPU-6050 dikare FIFO bikar bîne da ku daneyên sensor hilîne, lê me ew di vê beşê de bikar ne aniye, ji ber vê yekê hemî kanalên FIFO-yê girtî ne.Ev dikare di tomara FIFO aktîf de were kontrol kirin (0x23).Ji hêla xwerû ve, nirxa vê tomarê 0 e (ew e, FIFO seqet e), ji ber vê yekê em dikarin rasterast nirxa xwerû bikar bînin.Rêjeya nimûneyê ya gyroscope ji hêla Rêjeya Nimûneyê ve hatî kontrol kirin (0x19).Bi gelemperî, me ev rêjeya nimûneyê ji 50 re destnîşan kir.Bi gelemperî, em ê DLPF-ê bi nîvê bandwidth bicîh bikin da ku bilez û bilez bersiva daneyê balans bikin.
Sermiyana demjimêra Pergalê bicîh bikin û Sensor û Sensora Leza Veguheztinê ya Angular Vebijêrin
Mîhenga çavkaniya pergala pergalê bi rêveberiya hêzê ve girêdayî ye 1 (0x6b), li ku derê sê bîtên herî nizm ên vê tomarê hilbijartina çavkaniya demjimêra diyar dike.Bi xwerû, ev sê bît têne danîn, ku tê vê wateyê ku pergal oscillator 8MHz RC ya navxwe wekî çavkaniya demjimêr bikar tîne.Lêbelê, ji bo ku hûn rastiya demjimêra baştir bikin, em pir caran wê li 1 danîn û hilbijêrin X-axê Gyroscope PLL wekî çavkaniya demjimêra hilbijêrin.Digel vê yekê, gengaz e ku Sensor Sensor û bilez û bezê bilez jî di pêvajoya destpêkê de gavek girîng e.Her du operasyon bi navgîniya rêveberiya hêzê têne qeyd kirin 2 (0x6c).Simply bitenê hevbeş ji 0 re danîn da ku sensorên têkildar çalak bikin.Piştî ku gavên jorîn temam bikin, MPU-6050 dikare rewşa xebata normal têkeve.Ew qeydên ku ne taybetî têne danîn dê nirxên xwerû yên ji hêla pergalê ve werin pejirandin.
MPU-6050 çawa dixebite?
Gyro sensor
Sensor bi gyro di hundurê de tête çêkirin, ku dê her gav ji ber bandora gyroskopî bi rêgezê destpêkê ve bimîne.Ji ber vê yekê, em dikarin bi danîna devjeniya gyro ya ji rêça destpêkê ve rêça rotîn û zeviyê bi kilît bikin.
Sensora lezgîn
Sensorek bilez amûrek e ku dikare pîvandinê pîvanê bike û ew li ser bingeha prensîbê bandora piezoelectric pêk tê.Di dema lezkirinê de, sensor hêza înkariyê ya ku li ser bloka girseyê tê sepandin û dûv re nirxa bilezkirinê bi karanîna yasaya duyemîn a Newton tê hesibandin.
Pêvajoya Tevgerê Dîjîtal (DMP)
DMP modulek daneya daneyê ye ku di çîmentoyê MPU6050 de ye ku ji bo wergirtina daneyên ji Gyroscope û Sensorên Grooscope û Leza Daxuyaniyê re algorithmek çêkiriye.Ev taybetmendî pir kêm kêmkirina mîkroxera periyodîkî kêm dike û ji pêvajoya fosionê ya tezmînat û pêvajoya fusionê ya daneyê dûr dixe.
Notes:
Quaternions: Quaternions hejmarên supercomplex hêsan in.Hejmarên tevlihev ji hejmarên rastîn pêk tê plus yekîneya xeyalî ya ku ez, li ku ez ^ 2 = -1 im.
Mpu-6050 li ku ye?
- pêlîstok
- lîstikên desta û portable
- Kontrolên lîstika tevgerê
- Teknolojiya Blurfree ™ (Ji bo Vîdyo / Still Stabilîzasyona Wêne)
- Teknolojiya Airsign ™ (ji bo ewlehî / erêkirinê)
- Instantgesture ™ IG ™ Naskirina Gesture
- Sensorên pêgirtî ji bo tenduristî, fitness û werzîşê
- lîstika tevger-çalak û çarçoveya serîlêdanê
- Teknolojiya Motioncommand ™ Technology (ji bo kurtkirina kurtefîlman)
- Karûbarên bingehîn ên bingehîn, xalên berjewendiyê, û hesabkirina mirî
- 3D Kontrolên Remote ji bo Internetnternetê DTV-ê ve girêdayî ye û qutiyên jorîn danîn, 3D Mişk
- Teknolojiya Touchany Woman (ji bo "No Touch" Kontrola Serlêdana UI ya UI
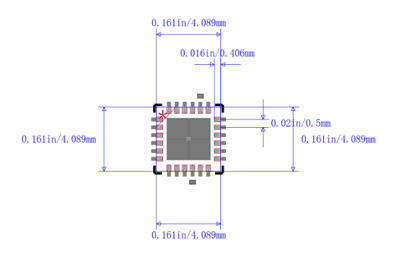
Package of MPU-6050
Meriv çawa dengê MPU-6050 kêm dike?
Em dikarin awayên jêrîn bavêjin da ku dengê MPU-6050 kêm bikin.
Sensorên calibrated bikar bînin
Calibrating Lccelerometer û Gyroscope of the MPU-6050 dikare bi xwe re biyarî û xeletiya sensoran hilweşîne, bi vî rengî bandora dengê kêm dike.Pêvajoya kalibrasyonê bi gelemperî ji du qonaxan pêk tê: Calibrasyona statîk û kalibrasyona tevgerê.
Pêvajoya Filterkirina Hardware
Kapasîteyên fîlterê li ser xeta hêzê ya MPU-6050-ê lê zêde dike dikare bandora dengê hêza peydakirina hêzê li ser sensor kêm bike.Di vê navberê de, di dema şêwaza PCB de, divê em hewl bidin ku MPU-6050 ji çavkaniyên potansiyel ên navbeynê bihêlin, wek xetên nîşana bilind-frekans û hêmanên hêz-hêz.
Pêvajoya Filterkirina Nermalavê
Piştî ku daneyên xav ji MPU-6050 berhev kirin, em dikarin girêdanek fîlterkirina nermalavê lê zêde bikin da ku daneyên destpêkê bidin da ku mudaxeleya dengek bêserûber hilweşînin.Rêbazên Filterkirina Nermalavê ya gelemperî tê wateya fîlterkirina navîn, fîlterkirina navîn, fîlterkirina Kalman û hwd.
Fîltera navxweyî ya navxweyî bikar bînin
MPU-6050 filterek nizm a yekbûyî ya hundurîn e, ku dikare were bikar anîn da ku ji bo çêkirina frekansa xwe ya qutkirinê were bikar anîn.Bi taybetî, em dikarin frekansa cutoff ya fîltera dîjîtal bi guhertina tomara mîhengê MPU-6050 saz bikin da ku dengê frekuency-frekuence ji hêla nimûneya A / D ve were rakirin.
Mpu-6050-based Hesabkirina Trajectory
MPU-6050 Accelerometer şeş-ax e û sensor gyroscope ku dikare were pîvandin kirin û helwesta tiştan were bikar anîn.Hesabkirina trajektorê ya tevgerê li ser bingeha MPU-6050 dikare ji hêla gavên jêrîn ve were fêm kirin:
Cara yekem ev e ku daneya hestiyar bixwîne.Pêwîst e ku em ji sensorên MPU-6050-ê yên MPU-6050 bi karanîna ajokarên guncan û pirtûkxaneyên pirtûkxaneyê bi daneyên bilez û gyroscope bixwînin.Van daneyan bi gelemperî di forma dîjîtal de derdikevin, ji ber vê yekê hin xebatên guhastinê û xebata calibrasyonê hewce ye ku wan di yekîneyên fîzîkî de veguherîne.
Pêça duyemîn ev e ku hesabkirin.Pêşîn, pêdivî ye ku em daneyên ji bilezkerê pêvajoyê bikin da ku di her axê de bilezkirina lêkerê derxînin.Piştra, ji bo ku em di her axayan de bilez û koçberkirina tiştê hesab bikin, pêdivî ye ku em daneyên bilezbûnê yek bikin.Teknîkên entegrasyonê yên hejmarî, wekî rêbaza Euler an rêbaza lunder-kutta, bi gelemperî di vê pêvajoyê de têne bikar anîn da ku rastiya hesabên koçberiyê bicîh bikin.
Pêngava sêyemîn ev e ku meriv bi leza angular were hesibandin.Bikaranîna daneyên Gyroscope, leza leza angular ya tiştê ku di her axê de dikare were hesibandin.Carek din, ev daneya pêdivî ye ku were qal kirin û veguheztin da ku di yekîneyên fîzîkî yên rastîn de leza angular bistînin.
Pêsta çaremîn ev e ku rotasyonê were hesibandin.Bi yekkirina daneyên lezgîn ên angular, angola zivirandina tiştê di her axê de dikare were hesibandin.Ev dikare bi karanîna teknîkên entegreyî yên hêjayî ve were kirin wekî rêbaza Euler an rêbaza Longe-Kutta ji bo hesabkirina zeviyê.
Pêngava pêncemîn ev e ku daneyan bihevre bike.Em daneyên ji bilezker û gyroscopes kom dikin da ku helwest û helwesta bêkêmasî ya tiştê peyda bikin.Ev dikare bi karanîna algorîtmsên wekî helwesta quaternion-based an çareserkirina angola euler.
Pêngava şeşan ev e ku encaman dîtbar e.Em trajektora tevgerê ya komploger veguherînin di pergalek hevrêz a 3D de veguherînin û wê amûrên dîtbarî yên guncan ji bo têgihiştinek bêtir intuitive ya ji bo guheztina tevgera tevgera tevgera tevgerê veguherînin.
Pirsên Pirs: Pirs]
1. Mpu6050 çiqas rast e?
Encamên bidestxistî ji% 1% û pêbaweriyê têra xwe nîşan dan, ku pêbaweriya rast a asîdiyê û standardên bilind ên pîşesaziya lift.
2. Meriv daneyên ji MPU6050 çawa bixwîne?
Ji bo ku qeydên MPU6050 yên navxweyî bixwînin, Master şertê destpêkirinê dişîne, li pey navnîşa Slave I2C û bitek nivîsandinê, û paşê navnîşa qeydkirinê ya ku dê were xwendin.
3. Mpu6050 li ku tê bikar anîn?
Di cîhazên tenduristî yên tenduristî, fitness-şopandina fitness de.Li dronan û quadcopters, MPU6050 ji bo kontrola pozîsyonê tête bikar anîn.Di kontrolkirina milê robotîk de tê bikar anîn.Amûrên kontrola gestê destan.
4. Mpu6050 an imu ye?
MPU6050 IMU SENSOR BLOCK DATA XWEDN XWEYN MPU-6050 SENORA MPU 6050 DIKE.Vebijarkên Hilbijartinê, Rêjeya angular, û germahiya li ser axên sensor.
5. Pêvajoya MPU6050 çi ye?
Ev pêvajoya serhêl a MPU6050 e ku daneyên ku ji bilez û gyroscope tê.DMP mifteya karanîna MPU6050 e û di paşê paşê de diyar dibe.Wekî ku digel ku hemî mîkropokesorên DMP hewce ne ku ji bo ku bisekinin firmware.
testa fonksiyonê.Berhemên lêçûnên herî zêde yên lêçûn û karûbarê çêtirîn dilsoziya me ya herheyî ye.
Gotara Hot
- CR2032 û CR2016 têne guheztin
- Mosfet: Definition, prensîba xebatê û hilbijartinê
- Sazkirin û ceribandin, şîrovekirina diagramên wiring ên relay
- CR2016 vs. CR2032 Cûdahî çi ye
- NPN vs PNP: Cûdahî çi ye?
- esp32 vs stm32: Kîjan mîkrokontrol ji bo we çêtir e?
- LM358 Rêbernameya Amplapatoriya Dual a Dual Rêbernameya Berfireh: Pinout, Diagrams, wekhev, mînakên bikêr
- CR2032 VS DL2032 VS CR2025 Rêbernameya Berhevdana CR2025
- Fêmkirina cûdahiyan ESP32 û ESP32-S3 analîzên teknîkî û performansa
- Analîzên berbiçav ên rêzika rêzikên RC
 Vebijarkên kapasîteyên û serlêdanên çîpa ragihandinê ya NRF24L01
Vebijarkên kapasîteyên û serlêdanên çîpa ragihandinê ya NRF24L01
2024-04-25
 MMBT3904 NPN Transistor: Rêbernameyên wê, Rêbernameya Serîlêdanê ya Berfireh, û MMBT3904 vs. MMBT5551
MMBT3904 NPN Transistor: Rêbernameyên wê, Rêbernameya Serîlêdanê ya Berfireh, û MMBT3904 vs. MMBT5551
2024-04-25
Hejmara beşa germ
 UPJ1J101MHD6TO
UPJ1J101MHD6TO CL05F153ZA5NNNC
CL05F153ZA5NNNC CGA4C3C0G2E821J060AA
CGA4C3C0G2E821J060AA CGB3B1X6S1A225M055AC
CGB3B1X6S1A225M055AC CGA7L1C0G3F330K160KA
CGA7L1C0G3F330K160KA- CL10C470FB8NNNC
 06031A180K4T2A
06031A180K4T2A GRM1885C2A8R1DA01D
GRM1885C2A8R1DA01D 1812GA220KAT1A
1812GA220KAT1A FH40-45S-0.5SV
FH40-45S-0.5SV
- XS1-L8A-64-TQ128-C5
- MPC8533VTALF
- A8585KLKTR-T
- W25Q16CVSFIG
- VE-2N3-MY
- VOR1142M4
- STM32F100VBT6B
- CD74HC14MT
- MC33771BTP2AE
- TSM104IDT
- BQ24616RGER
- LTC2259IUJ-16#PBF
- BQ26501PWR
- MT29F256G08CBCBBJ4-37:B
- MKE18F256VLH16
- TL16C752BLPTREP
- LTC1597BCG#PBF
- DML3006LFDS-7
- TLC5922DAP
- T491D476K010ZTZB01Z010
- AD73311LARUZ-REEL
- CMSH3-150MFL
- CS61577-IL1ZR
- CXA1393N-T3
- DS14C88TM
- EM7164SU16BRP-70LF
- LPC47M233-NC
- LTC1147LCS8-3.3
- M36L0R8060B5ZAQ
- MB87L2030PFV-G-BND
- PEF20320HV3.4
- SP3249CA
- TB6078FUG
- TC58NVG2S3EBAI5
- M88E1111-RCJ1
- NPCT650SBBWX
- EPM5128GM883B
- VI-812O59B
- TDA5051AT/C1